

{kind=link}
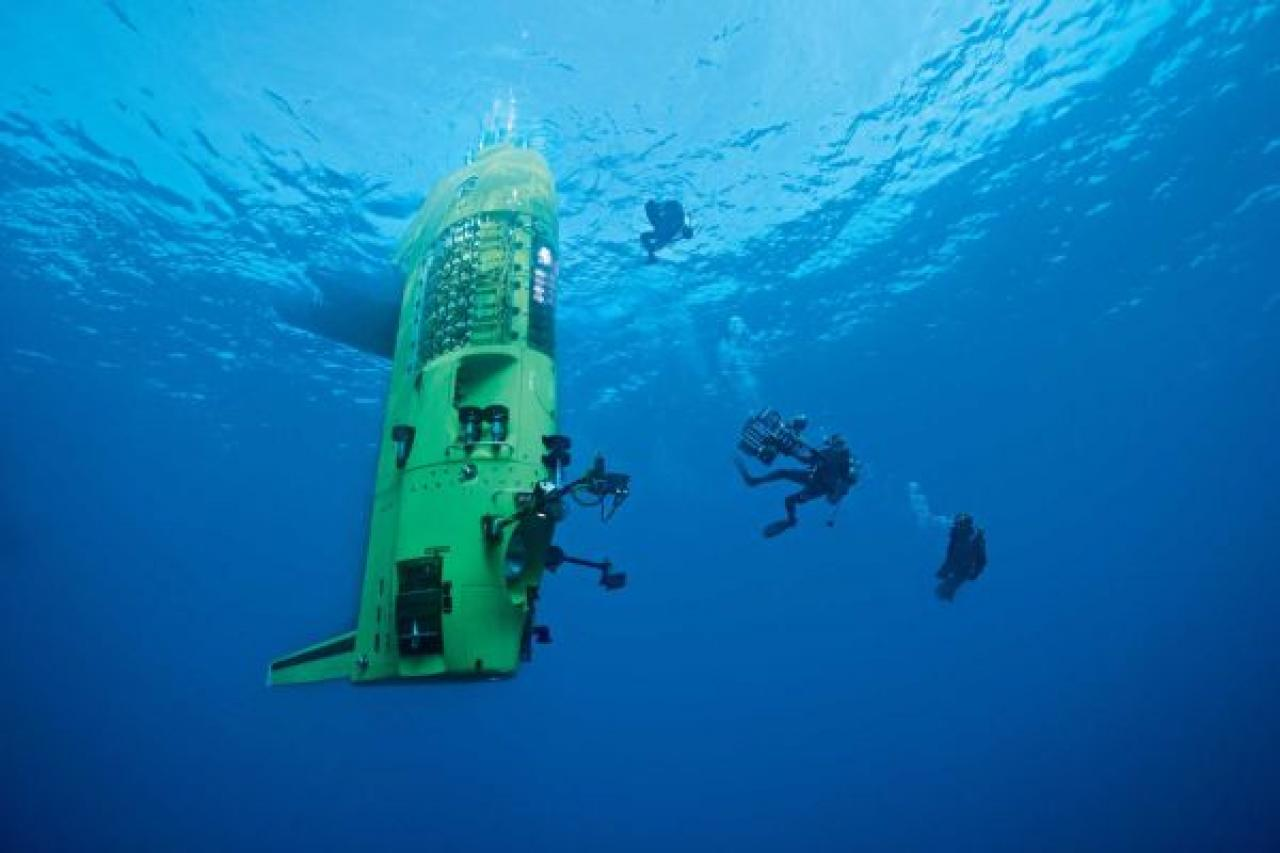
Deepsea Challenger (DCV 1) is a 7.3-metre (24 ft) deep-diving submersible designed to reach the bottom of Challenger Deep, the deepest-known point on Earth. On 26 March 2012, Canadian film director James Cameron piloted the craft to accomplish this goal in the second crewed dive reaching the Challenger Deep. Built in Sydney, Australia, by the research and design company Acheron Project Pty Ltd, Deepsea Challenger includes scientific sampling equipment and high-definition 3-D cameras; it reached the ocean’s deepest point after two hours and 36 minutes of descent from the surface.
Development
Deepsea Challenger was built in Australia, in partnership with the National Geographic Society and with support from Rolex, in the Deepsea Challenge program. The construction of the submersible was headed by Australian engineer Ron Allum.
Working in a small engineering workshop in Leichhardt, Sydney, Allum created new materials including a specialized structural syntactic foam called Isofloat, capable of withstanding the huge compressive forces at the 11-kilometre (6.8 mi) depth. The new foam is unique in that it is more homogeneous and possesses greater uniform strength than other commercially available syntactic foam yet, with a specific density of about 0.7, will float in water. The foam is composed of very small hollow glass spheres suspended in an epoxy resin and comprises about 70% of the submarine’s volume.
The foam’s strength enabled the Deepsea Challenger designers to incorporate thruster motors as part of the infrastructure mounted within the foam but without the aid of a steel skeleton to mount various mechanisms. The foam supersedes gasoline-filled tanks for flotation as used in the historic bathyscaphe Trieste.
Allum also built many innovations, necessary to overcome the limitations of existing products (and presently undergoing development for other deep sea vehicles). These include pressure-balanced oil-filled thrusters; LED lighting arrays; new types of cameras; and fast, reliable penetration communication cables allowing transmissions through the hull of the submersible. Allum gained much of his experience developing the electronic communication used in Cameron’s Titanic dives in filming Ghosts of the Abyss, Bismarck and others.
Power systems for the submarine were supplied by lithium batteries that were housed within the foam and can be clearly seen in publicity photographs of the vessel. The lithium battery charging systems were designed by Ron Allum. The submersible contains over 180 onboard systems, including batteries, thrusters, life support, 3D cameras, and LED lighting. These interconnected systems are monitored and controlled by a programmable automation controller (PAC) from Temecula, California-based controls manufacturer Opto 22. During dives, the control system also recorded depth, heading, temperature, pressure, battery status, and other data, and sent it to the support ship at three-minute intervals via an underwater acoustic communication system developed by West Australian company L-3 Nautronix.
The crucial structural elements, such as the backbone and pilot sphere that carried Cameron, were engineered by the Tasmanian company Finite Elements. The design of the interior of the sphere, including fireproofing, condensation management and mounting of control assemblies, was undertaken by Sydney-based industrial design consultancy Design + Industry.
Dives
In late January 2012, to test systems, Cameron spent three hours in the submersible while submerged just below the surface in Australia’s Sydney Naval Yard. On 21 February 2012, a test dive intended to reach a depth of over 1,000 m (3,300 ft) was aborted after only an hour because of problems with cameras and life support systems. On 23 February 2012, just off New Britain Island, Cameron successfully took the submersible to the ocean floor at 991 m (3,251 ft), where it made a rendezvous with a yellow remote operated vehicle operated from a ship above. On 28 February 2012, during a seven-hour dive, Cameron spent six hours in the submersible at a depth of 3,700 m (12,100 ft). Power system fluctuations and unforeseen currents presented unexpected challenges.
Challenger Deep
On 18 March 2012, after leaving the testing area in the relatively calm Solomon Sea, the submersible was aboard the surface vessel Mermaid Sapphire, docked in Apra Harbor, Guam, undergoing repairs and upgrades, and waiting for a calm enough ocean to carry out the dive. By 24 March 2012, having left port in Guam days earlier, the submersible was aboard one of two surface vessels that had departed the Ulithi atoll for the Challenger Deep.
On 26 March 2012 it was reported that it had reached the bottom of the Mariana Trench.
Descent, from the beginning of the dive to arrival at the seafloor, took two hours and 37 minutes, almost twice as fast as the descent of Trieste. A Rolex watch, “worn” on the sub’s robotic arm, continued to function normally throughout the dive. Not all systems functioned as planned on the dive: bait-carrying landers were not dropped in advance of the dive because the sonar needed to find them on the ocean floor was not working, and hydraulic system problems hampered the use of sampling equipment. Nevertheless, after roughly three hours on the seafloor and a successful ascent, further exploration of the Challenger Deep with the unique sub was planned for later in the Spring of 2012.
Records
On 26 March 2012, Cameron reached the bottom of the Challenger Deep, the deepest part of the Mariana Trench. The maximum depth recorded during this record-setting dive was 10,908 metres (35,787 ft). Measured by Cameron, at the moment of touchdown, the depth was 10,898 m (35,756 ft). It was the fourth-ever dive to the Challenger Deep and the second crewed dive (with a maximum recorded depth slightly less than that of Trieste’s 1960 dive). It was the first solo dive and the first to spend a significant amount of time (three hours) exploring the bottom.
Mariana Trench | in search of the abyss

Megathreads and spaces to hang out:
- ❤️ Come listen to music and Watch movies with your fellow Hexbears nerd, in Cy.tube
- 💖 Come talk in the New Monthly queer thread
- 💛 Read and talk about a current topics in the News Megathread
- ⭐️ October Movie Nominations ⭐️
reminders:
- 💚 You nerds can join specific comms to see posts about all sorts of topics
- 💙 Hexbear’s algorithm prioritizes struggle sessions over upbears
- 💜 Sorting by new you nerd
- 🌈 If you ever want to make your own megathread, you can go here nerd
- 🐶 Join the unofficial Hexbear-adjacent Mastodon instance toots.matapacos.dog
Links To Resources (Aid and Theory):
Aid:
- 💙Comprehensive list of resources for those in need of an abortion – reddit link
- 💙Resources for Palestine
Theory: